YOLO-v2¶
ConvNet One-Stage Detector Object Detection
- class lucid.models.YOLO_V2(num_classes: int, num_anchors: int = 5, anchors: list[tuple[float, float]] | None = None, lambda_coord: float = 5.0, lambda_noobj: float = 0.5, darknet: Module | None = None, route_layer: int | None = None, image_size: int = 416, use_passthrough: bool = True)¶
The YOLO_V2 class implements the YOLO-v2 object detection model. It is an improvement over YOLO-v1, designed to detect objects in images using anchor-based bounding boxes, batch normalization, and a stronger backbone (Darknet-19).
Class Signature¶
class YOLO_V2(
num_classes: int,
num_anchors: int = 5,
anchors: list[tuple[float, float]] | None = None,
lambda_coord: float = 5.0,
lambda_noobj: float = 0.5,
darknet: nn.Module | None = None,
route_layer: int | None = None,
image_size: int = 416,
)
Parameters¶
darknet (nn.Module, optional): A custom backbone model for feature extraction. If set to None (default), the model uses the pre-configured Darknet-19 architecture.
Attributes¶
darknet (nn.Module): The feature extraction backbone model, either a custom model or Darknet-19. If None is passed, Darknet-19 is used by default.
detect_head (nn.Module): The detection head that processes the output from the backbone and generates bounding boxes and class scores.
Methods¶
Darknet-19 Integration¶
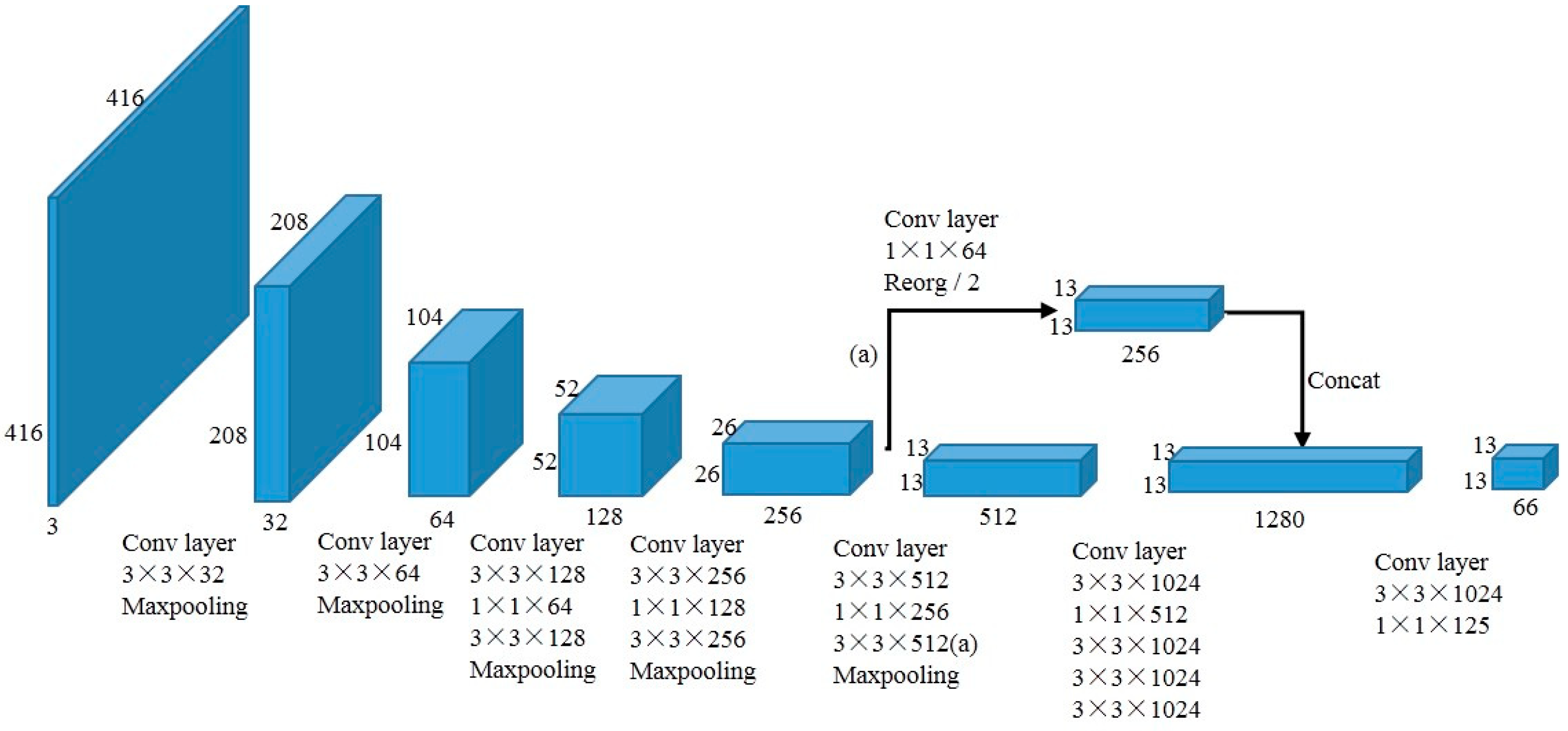
The default backbone for the YOLO_V2 class is Darknet-19, a convolutional neural network designed for efficient feature extraction.
When darknet=None is passed during initialization, the model automatically uses the pre-defined Darknet-19 architecture.
To use the Darknet-19 network for object detection, the user must “pop” the network from the model to use it for training on the classification task.
This can be done using .darknet_19:
yolo_v2_model = YOLO_V2()
darknet_model = yolo_v2_model.darknet_19
After training on the classification task, the trained darknet can be automatically integrated back into the YOLO_V2 model.
Warning
If a custom backbone is provided (i.e., passing a custom darknet model during initialization), the darknet_19 attribute will raise an AttributeError because the custom backbone does not have the full pre-built Darknet-19 structure.
Input Format¶
The target tensor from the dataset should have shape:
(N, S, S, B * (5 + C))
Where:
S is split_size (grid size),
B is num_anchors (number of anchor boxes per grid cell),
C is num_classes.
Each vector at (i, j) of shape (B * (5 + C)) is flattened and contains:
For each box b = 0 .. B-1: (x, y, w, h, conf, cls_1, …, cls_C)
YOLO-v2 Loss¶
The YOLO-v2 loss function builds upon YOLO-v1’s multi-part loss and incorporates anchor boxes. For a grid of size \(S \times S\) and \(B\) anchors per grid cell, the predicted tensor shape becomes \((S, S, B \times (5 + C))\) where:
5 = [x, y, w, h, objectness]
C = number of classes
The total loss \(\mathcal{L}\) is composed of three parts:
Where:
\(\hat{t}_{x,ij}, \hat{t}_{y,ij}, \hat{t}_{w,ij}, \hat{t}_{h,ij}\) are the raw network outputs for the bounding box parameters
\(t_{x,ij}, t_{y,ij}\) are the target offsets of the box center relative to the grid cell location
\(t_{w,ij}, t_{h,ij}\) are the target log-scale factors relative to the anchor dimensions
\(\hat{C}_{ij} = \sigma(\hat{t}_{o,ij})\) is the predicted objectness score
\(C_{ij}\) is the target confidence (1 if the anchor is responsible for an object, 0 otherwise; anchors with IoU above the ignore threshold are excluded)
\(\hat{p}_{ij}(c)\) are the predicted class probabilities (after sigmoid) for class \(c\)
\(p_{ij}(c)\) are the ground-truth class probabilities (one-hot encoding)
\(\mathbb{1}_{ij}^{\text{obj}}\) indicates if anchor \(j\) in cell \(i\) is responsible for detecting an object
\(\mathbb{1}_{ij}^{\text{noobj}} = 1 - \mathbb{1}_{ij}^{\text{obj}}\) indicates that anchor \(j\) in cell \(i\) is not responsible for any object
Note
Unlike YOLO-v1, YOLO-v2 uses predefined anchors and decouples object classification and localization more clearly, improving detection stability and accuracy.
Prediction Output¶
Calling model.predict(…) returns final post-processed detections after applying confidence thresholding and non-maximum suppression (NMS).
The return value is a list of length N (batch size), where each element is a list of dictionaries representing the detected objects in that image. Each dictionary has the following keys:
“box”: Tensor of shape (4,) representing the absolute coordinates [x1, y1, x2, y2] of the bounding box in pixels
“score”: Confidence score after multiplying objectness with class probability
“class_id”: Predicted class index
Example Usage¶
Using YOLO-V2 with default Darknet-19
>>> import lucid
>>> import lucid.models as models
>>> model = models.YOLO_V2() # Uses default Darknet-19 backbone
>>> input_tensor = lucid.Tensor(..., requires_grad=False)
>>> output = model(input_tensor)
>>> print(output.shape)
Using YOLO-V2 with a custom backbone
>>> custom_darknet = ... # Define or load your custom backbone
>>> model = models.YOLO_V2(darknet=custom_darknet)
>>> input_tensor = lucid.Tensor(..., requires_grad=False)
>>> output = model(input_tensor)
>>> print(output.shape)
Backward Propagation¶
The YOLO-V2 model supports backpropagation through its network for training purposes. During backpropagation, gradients are computed and propagated through the darknet layers as well as the detection head:
>>> output.backward()
>>> print(input_tensor.grad) # Gradients w.r.t. the input tensor